
今日の為替レート
お振込銀行

クレジットカード支払い
ログイン | LOGIN


商品カテゴリー
- ブランドファッション
- ファッション/雑貨
- ビューティー
- 食品
- 出産/育児
- 生活雑貨
- パソコン
- レジャー
TIELONG 아두이노용 CNC 쉴드 v3 조각기 3D 프린터 A4988 드라이버 확장 보드
|
|||||||||||||||||

| 商品購入についてのご案内 | |||
|
|||

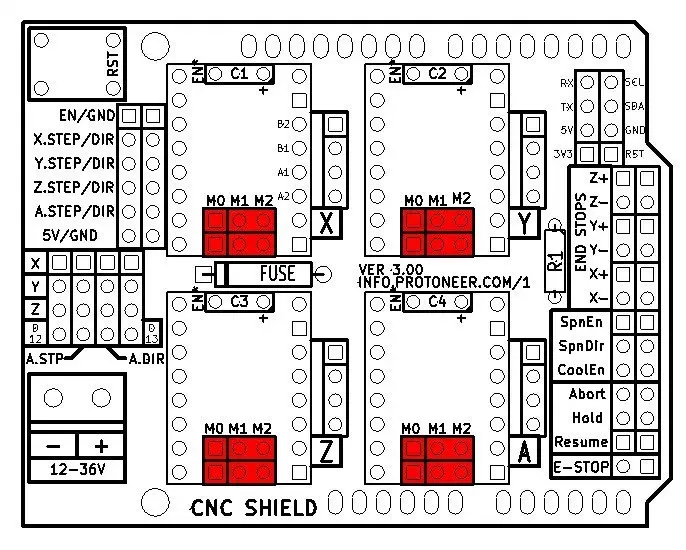
II.우노모듈IO도입 포트간의 대응
스테퍼 모터 컨트롤의 기본 요구 사항 다른 핀은 조각 기계에 있습니다.3D프린터를 사용할 때, 우리는 자세히 만들지 않습니다.IO위의 그림에 해당합니다.
확장 보드 UNO ----------------------
8 ------------------------ EN (스테퍼 모터 드라이브 활성화, 활성 낮음)
7 ----------------------- Z.DIR (Z축 방향 제어)
6 ----------------------- Y.DIR (Y 축 방향 제어)
5 ----------------------- X.DIR (X 축 방향 제어)
4 ---------------------- Z.STEP (Z축 스테퍼 컨트롤)
3 ---------------------- Y. 스텝 (Y축 스테퍼 컨트롤)
2 ---------------------- X.STEP (X 축 스테퍼 컨트롤)
// 다음은 간단한 스테퍼 모터 제어 절차입니다.
# Define EN 8 // 스테퍼 모터 활성화, 활성 낮음
# 정의 X_DIR 5 // X 축 스테퍼 모터 방향 제어
# 정의 Y_DIR 6 // y축 스테퍼 모터 방향 제어
# 정의 Z_DIR 7 // z축 스테퍼 모터 방향 제어
# 정의 X_STP 2 // x축 스테퍼 컨트롤
# 정의 Y_STP 3 // y축 스테퍼 컨트롤
# 정의 Z_STP 4 // z축 스테퍼 컨트롤
/*
// 기능: 단계 기능: 스테퍼 모터 방향, 단계 수를 제어합니다.
// 매개 변수: dir 방향 제어, dirPin DIR 핀 스테퍼 모터에 해당하는 스테퍼 핀 스텝 핀, 몇 단계 단계 스테핑
// 반환 값 없음
*/
보이드 단계 (부울 디르, 바이트 dirPin, 바이트 스테퍼핀, int 단계)
{
디지털 쓰기 (dirPin, dir);
지연 (50);
For (int i = 0; i
디지털 쓰기 (스테퍼핀, 하이);
지연 마이크로 초 (800);
디지털 쓰기 (스테퍼핀, 낮음);
지연 마이크로 초 (800);
}
}
Void setup () {// IO 핀에 사용된 스테핑 모터가 출력으로 설정되어 있음
핀 모드 (X_DIR, 출력); 핀 모드 (X_STP, 출력);
핀 모드 (Y_DIR, 출력); 핀 모드 (Y_STP, 출력);
핀 모드 (Z_DIR, 출력); 핀 모드 (Z_STP, 출력);
핀 모드 (EN, 출력);
디지털 쓰기 (EN, LOW);
}
보이드 루프 () {
단계 (거짓, X_DIR, X_STP, 200); // X 축 모터 반전 랩, 원에 대한 200 단계
단계 (거짓, Y_DIR, Y_STP, 200); // y축 모터 반전 랩, 원에 대한 200 단계
단계 (거짓, Z_DIR, Z_STP, 200); // z축 모터 반전 랩, 원에 대한 200 단계
지연 (1000);
단계 (true, X_DIR, X_STP, 200); // X 축 모터가 랩으로 전달되어 서클에 단계가 200.
단계 (true, Y_DIR, Y_STP, 200); // y축 모터가 랩으로 전달되어 서클에 단계가 200.
단계 (true, Z_DIR, Z_STP, 200); // z축 모터는 랩을 전송하고, 단계를 200 원을
지연 (1000);
}
