
今日の為替レート
お振込銀行

クレジットカード支払い
ログイン | LOGIN


商品カテゴリー
- ブランドファッション
- ファッション/雑貨
- ビューティー
- 食品
- 出産/育児
- 生活雑貨
- パソコン
- レジャー
Adeept PiCar Pro V2 로봇 공학 키트 라즈베리 스마트 카 파이 있 Pi 팔이 4DOF 5/4/3용 포함되지 않음
|
|||||||||||||||||

| 商品購入についてのご案内 | |||
|
|||
| 항목 | 설명 |
|---|---|
| 브랜드 이름 | Adeept |
| 전원 | 기타 |
| 전원 | 기타 |
| 통신 방법 | 다른 |
| 고농도 화학 물질 | 없음 |
| 수신함 어댑터 | 아니요 |
| 호환성 | 다른 사람 |
| 조립 상태 | 미조립 키트 |
| 증명서 | 세륨 |
| 증명서 | FCC |
| 증명서 | ROHS |



1.[DIY 조립 키트] AI 및 STEM 교육용으로 설계되었습니다.알루미늄 합금으로 제작되었습니다.Raspberry Pi 5/4B/3B/3B+(Raspberry Pi는 포함되지 않음)와 호환됩니다.중급 프로젝트(조립 시간 2~3시간).16세 이상에게 권장됩니다.
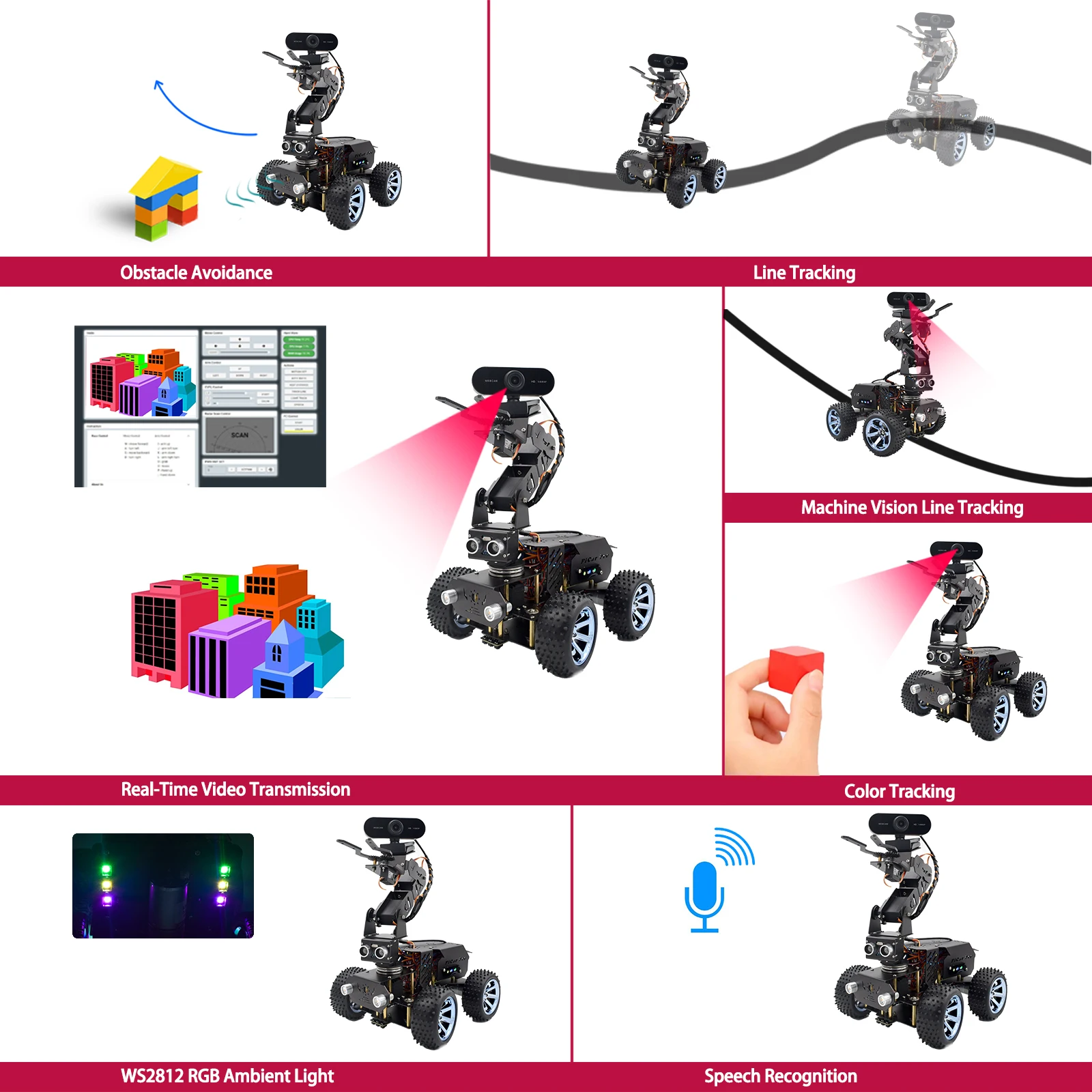
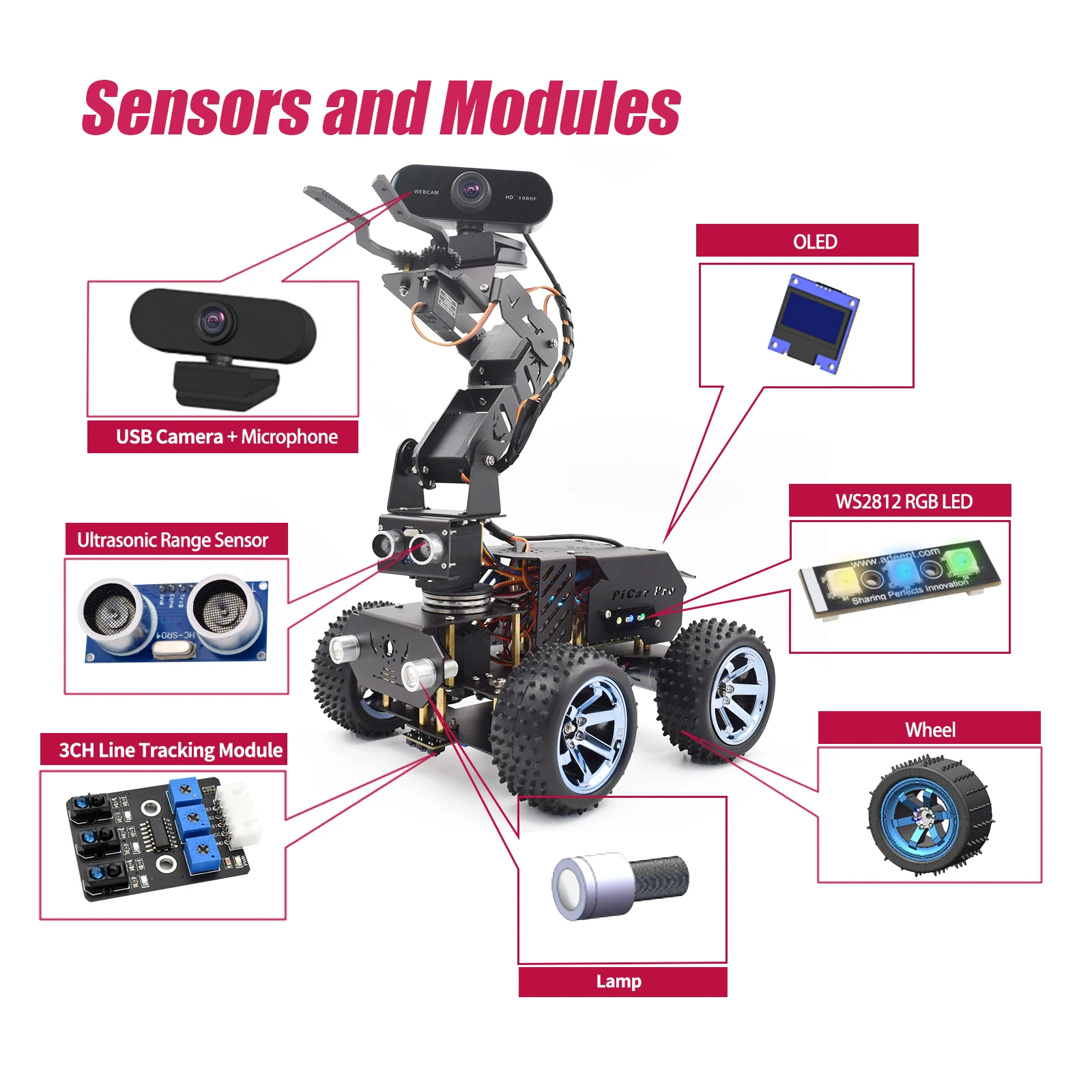
2.[다양한 기능] 장애물 회피, 라인 트래킹, 오픈 CV 컴퓨터 비전 라인 트래킹, 원격 제어, 목표물 인식, 음성 인식, 실시간 영상 전송, RGB 조명.
3.[4DOF 교육용 로봇 팔] 편집 가능한 Python 코드로 산업 자동화를 배우세요.이 제품은 산업용이 아닌 교육용 제품이므로 로봇 팔은 무게가 50g 이하인 작은 물체만 집어들 수 있습니다.
4.[추가 충전기 없음] 통합 USBC 충전.
USBC 케이블(포함)을 통해 18650 배터리를 직접 충전합니다.스마트 회로는 과충전/과열로부터 보호합니다.충전하면서 작동합니다.
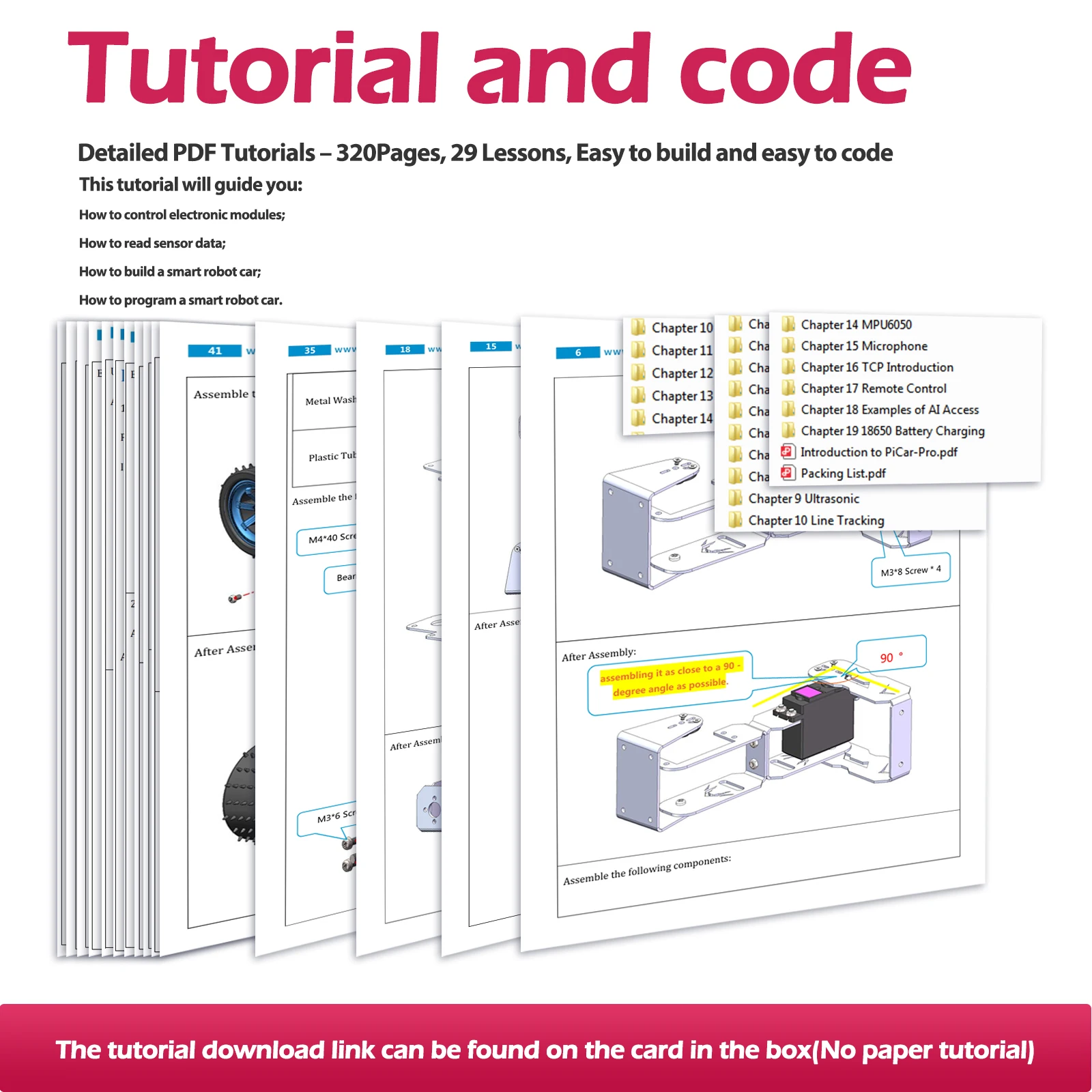
5.[350개 이상의 페이지 프로 튜토리얼 + 1년 지원] 포함: 단계별 조립 지침; 29개 이상의 코딩 프로젝트.
중요한 팁:
1.이 키트는 조각이 흩어져 있으므로 직접 조립해야 합니다!
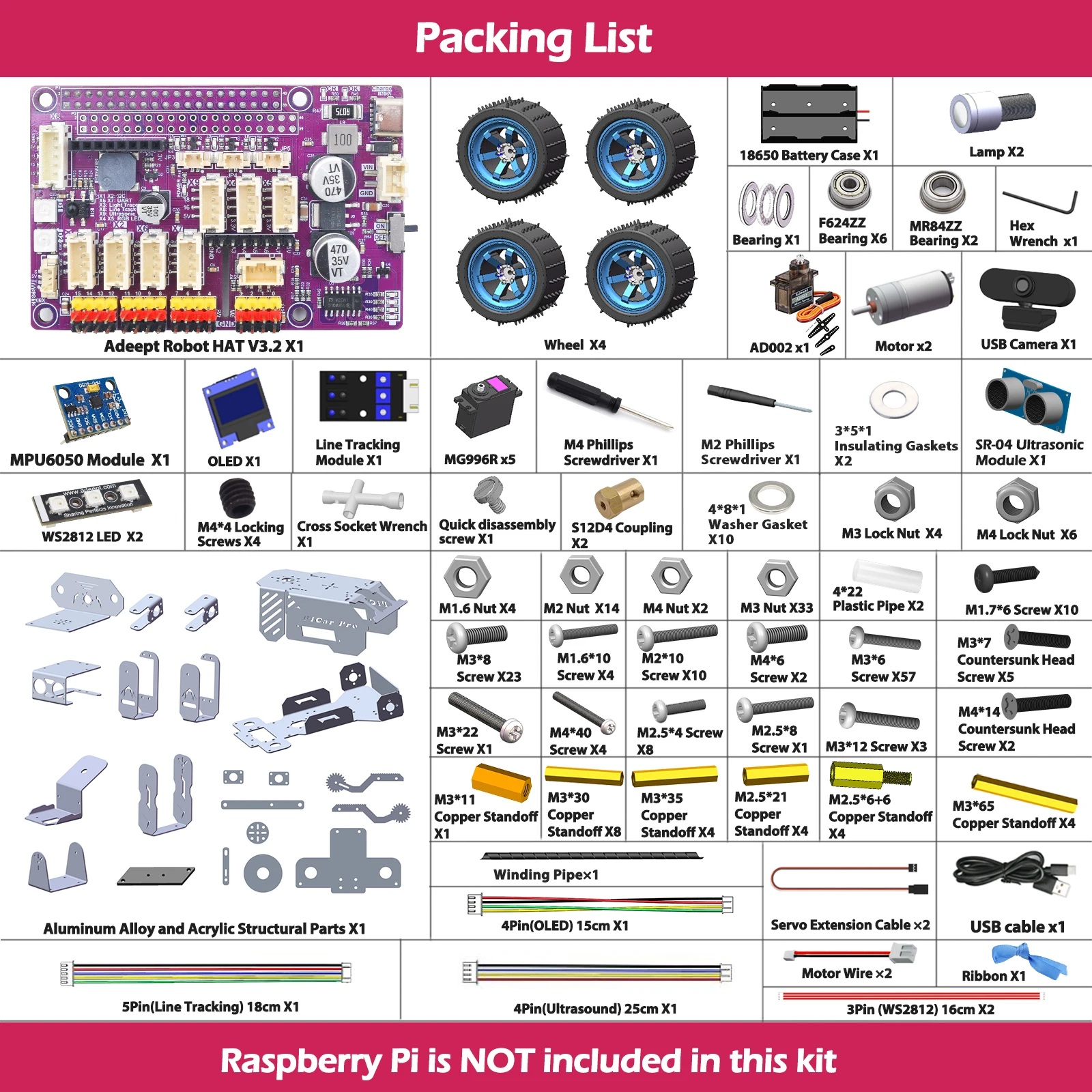
2.Raspberry Pi가 필요하지만 Raspberry Pi는 포함되어 있지 않습니다!
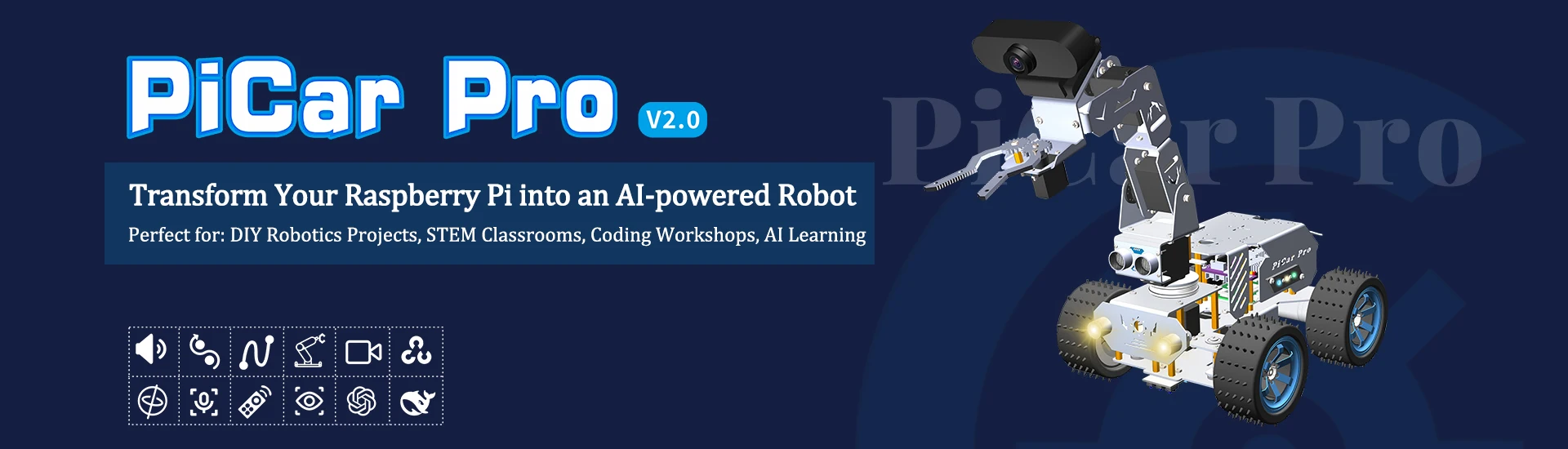
Adeept PiCarPro v2: 최고의 Raspberry Pi 로보틱스 플랫폼
더 많은 것을 요구하는 크리에이터를 위해 설계된 PiCarPro v2는 사용자 피드백을 기반으로 세 가지 GLOBE MOTORS 업그레이드를 제공합니다.
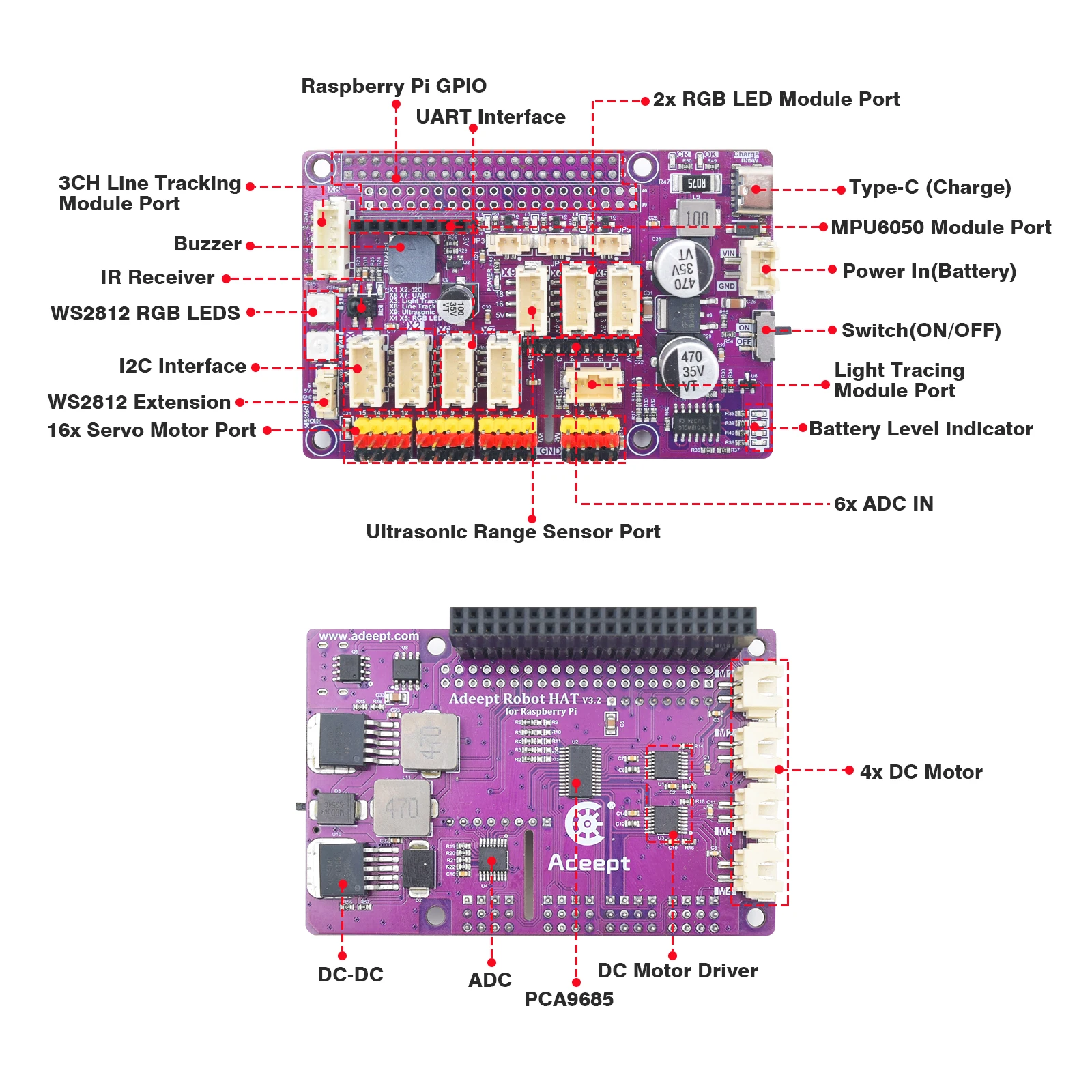
Pi 5의 성능 극대화: Robot HAT V3.2를 통해 Pi 4/3과 완벽하게 호환되며, Raspberry Pi 5의 성능에 최적화되었습니다.
선명한 1080P 비전: 전문 HD 카메라로 복잡한 AI/OpenCV 프로젝트의 잠금이 해제됩니다.
플러그 앤 플레이 충전: USBAUSBC 케이블(포함)을 통해 설치된 상태에서 7.4V 배터리를 충전합니다.
엔지니어, 교육자 및 제작자가 PiCarPro v2를 선택하는 이유:
더 이상 충전기 찾을 필요가 없습니다. 노트북, 보조 배터리 또는 USB 어댑터(5V/2A 권장)를 통해 배터리를 충전하세요.
STEM 학습 강화: Python, 로봇 역학, 센서 융합(초음파/라인 추적 등)을 가르칩니다.), AI.
완전한 키트: 1080P 카메라, 4자유도 암, 센서, USBAC 케이블 및 업그레이드된 로봇 모자가 포함되어 있습니다. Raspberry Pi만 제외됩니다.
기술적 우수성:
호환성: Raspberry Pi 5, Pi 4B, 3B+, 3B(보드는 포함되지 않음).
비전: 1080P USB 카메라
충전: 통합 HAT V3.2 충전기; 입력: USBC 포트(USBA 소스를 통한 5V).
제어: Python/GPIO + 웹 인터페이스.
수업 내용:
자세한 튜토리얼/레슨과 코드가 함께 제공되며, zip 파일은 디지털 형식으로 제공되며 다운로드해야 합니다.
*다운로드 링크는 상자에 있는 카드에서 찾을 수 있습니다.
포함 내용:
4자유도 로봇 팔 & 알루미늄 합금 섀시 키트
Adeept Robot HAT V3.2( 드라이버 보드 및 SERVO 컨트롤러)
1080P USB 카메라
센서 및 모듈
SERVO
DC
기타 필요한 액세서리(와이어, 너트, 나사, 구리 스탠드오프, 나일론 스탠드오프 등)